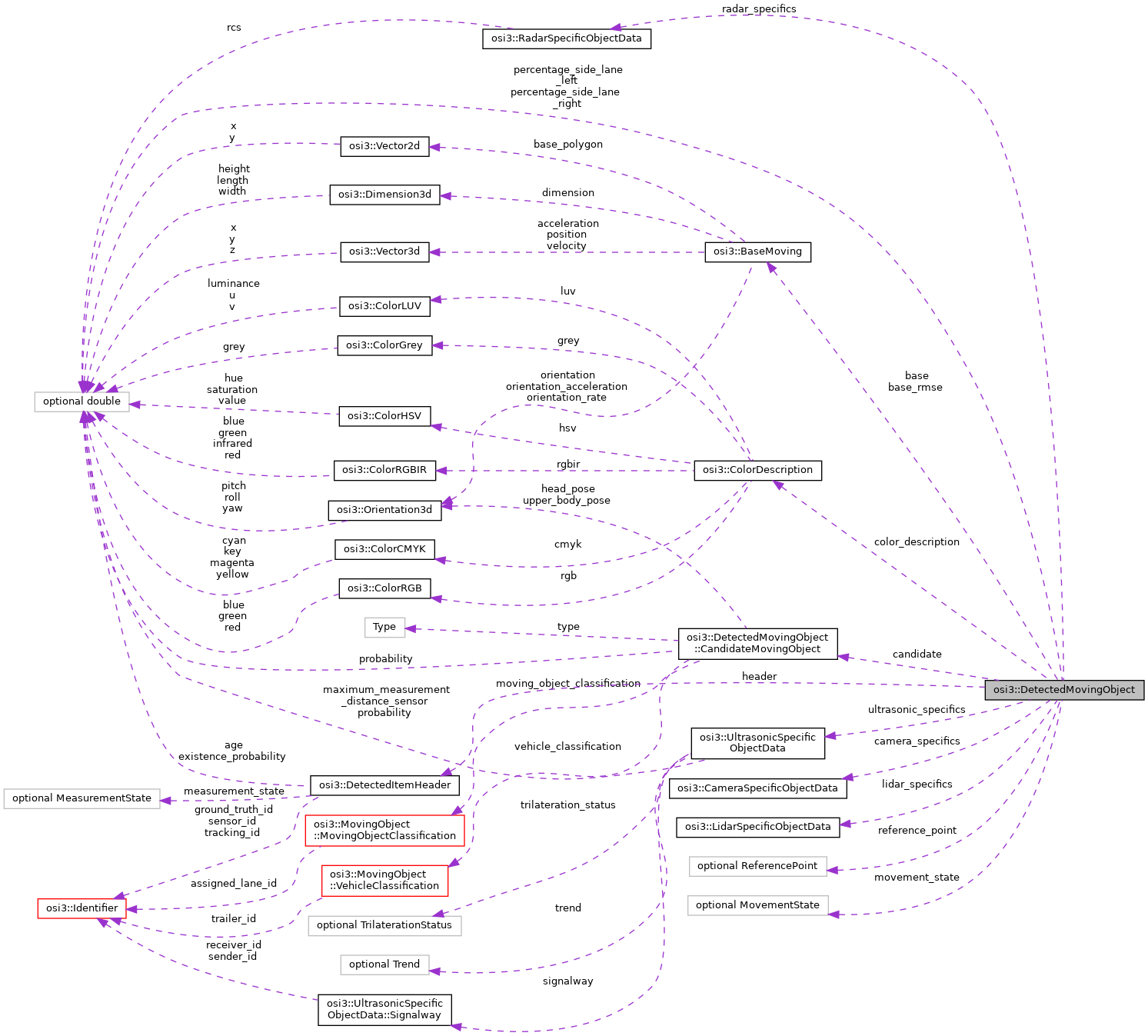
Moving object in the environment as detected and perceived by the sensor. More...
Classes | |
| struct | CandidateMovingObject |
| A candidate for a detected moving object as estimated by the sensor. More... | |
Public Types | |
| enum | ReferencePoint { REFERENCE_POINT_UNKNOWN = 0 , REFERENCE_POINT_OTHER = 1 , REFERENCE_POINT_CENTER = 2 , REFERENCE_POINT_MIDDLE_LEFT = 3 , REFERENCE_POINT_MIDDLE_RIGHT = 4 , REFERENCE_POINT_REAR_MIDDLE = 5 , REFERENCE_POINT_REAR_LEFT = 6 , REFERENCE_POINT_REAR_RIGHT = 7 , REFERENCE_POINT_FRONT_MIDDLE = 8 , REFERENCE_POINT_FRONT_LEFT = 9 , REFERENCE_POINT_FRONT_RIGHT = 10 } |
| enum | MovementState { MOVEMENT_STATE_UNKNOWN = 0 , MOVEMENT_STATE_OTHER = 1 , MOVEMENT_STATE_STATIONARY = 2 , MOVEMENT_STATE_MOVING = 3 , MOVEMENT_STATE_STOPPED = 4 } |
Public Attributes | |
| optional DetectedItemHeader | header = 1 |
| optional BaseMoving | base = 2 |
| optional BaseMoving | base_rmse = 3 |
| optional ReferencePoint | reference_point = 4 |
| optional MovementState | movement_state = 5 |
| optional double | percentage_side_lane_left = 6 |
| optional double | percentage_side_lane_right = 7 |
| repeated CandidateMovingObject | candidate = 8 |
| optional ColorDescription | color_description = 9 |
| optional RadarSpecificObjectData | radar_specifics = 100 |
| optional LidarSpecificObjectData | lidar_specifics = 101 |
| optional CameraSpecificObjectData | camera_specifics = 102 |
| optional UltrasonicSpecificObjectData | ultrasonic_specifics = 103 |
Detailed Description
Moving object in the environment as detected and perceived by the sensor.
Member Enumeration Documentation
◆ MovementState
Information about a possible movement of the object during tracking.
◆ ReferencePoint
Definition of available reference points. Left/middle/right and front/middle/rear indicate the position in y- and x-direction respectively. The z position is always considered as middle.
Member Data Documentation
◆ base
| optional BaseMoving osi3::DetectedMovingObject::base = 2 |
The base parameters of the moving object.
- Note
- The bounding box does NOT includes mirrors for vehicles.
-
The parent frame of
baseis the sensor's vehicle frame. - The height includes the ground_clearance. It always goes from the top to the ground.
◆ base_rmse
| optional BaseMoving osi3::DetectedMovingObject::base_rmse = 3 |
The root mean squared error of the base parameters of the detected moving object (e.g. car). MovingObject::base has to be identical for all candidate moving objects.
- Note
- The parent frame of
baseis the sensor's vehicle frame.
◆ camera_specifics
| optional CameraSpecificObjectData osi3::DetectedMovingObject::camera_specifics = 102 |
Additional data that is specific to camera sensors.
- Note
- Field needs not to be set if simulated sensor is not a camera sensor.
◆ candidate
| repeated CandidateMovingObject osi3::DetectedMovingObject::candidate = 8 |
A list of candidates for this moving object as estimated by the sensor (e.g. pedestrian, car).
- Note
- OSI uses singular instead of plural for repeated field names.
◆ color_description
| optional ColorDescription osi3::DetectedMovingObject::color_description = 9 |
The dominating color of the material of the moving object.
◆ header
| optional DetectedItemHeader osi3::DetectedMovingObject::header = 1 |
Common information of one detected item.
◆ lidar_specifics
| optional LidarSpecificObjectData osi3::DetectedMovingObject::lidar_specifics = 101 |
Additional data that is specific to lidar sensors.
- Note
- Field needs not to be set if simulated sensor is not a lidar sensor.
◆ movement_state
| optional MovementState osi3::DetectedMovingObject::movement_state = 5 |
Actual movement state w.r.t. the moving object history.
◆ percentage_side_lane_left
| optional double osi3::DetectedMovingObject::percentage_side_lane_left = 6 |
Percentage side lane left.
Percentage value of the object width in the corresponding lane.
- Note
- DEPRECATED: Use assigned_lane_percentage in MovingObjectClassification instead.
\rules is_greater_than_or_equal_to: 0 is_less_than_or_equal_to: 100 \endrules
◆ percentage_side_lane_right
| optional double osi3::DetectedMovingObject::percentage_side_lane_right = 7 |
Percentage side lane right.
Percentage value of the object width in the corresponding lane.
- Note
- DEPRECATED: Use assigned_lane_percentage in MovingObjectClassification instead.
\rules is_greater_than_or_equal_to: 0 is_less_than_or_equal_to: 100 \endrules
◆ radar_specifics
| optional RadarSpecificObjectData osi3::DetectedMovingObject::radar_specifics = 100 |
Additional data that is specific to radar sensors.
- Note
- Field needs not to be set if simulated sensor is not a radar sensor.
◆ reference_point
| optional ReferencePoint osi3::DetectedMovingObject::reference_point = 4 |
Reference point location specification of the sensor measurement (required to decouple sensor measurement, position and bounding box estimation) as used by the sensor (model).
- Note
- Note that the value of this field has no impact on the value of object::position, which always references the center of the object / bounding box.
◆ ultrasonic_specifics
| optional UltrasonicSpecificObjectData osi3::DetectedMovingObject::ultrasonic_specifics = 103 |
Additional data that is specific to ultrasonic sensors.
- Note
- Field needs not to be set if simulated sensor is not an ultrasonic sensor.
The documentation for this struct was generated from the following file:
- osi_detectedobject.proto