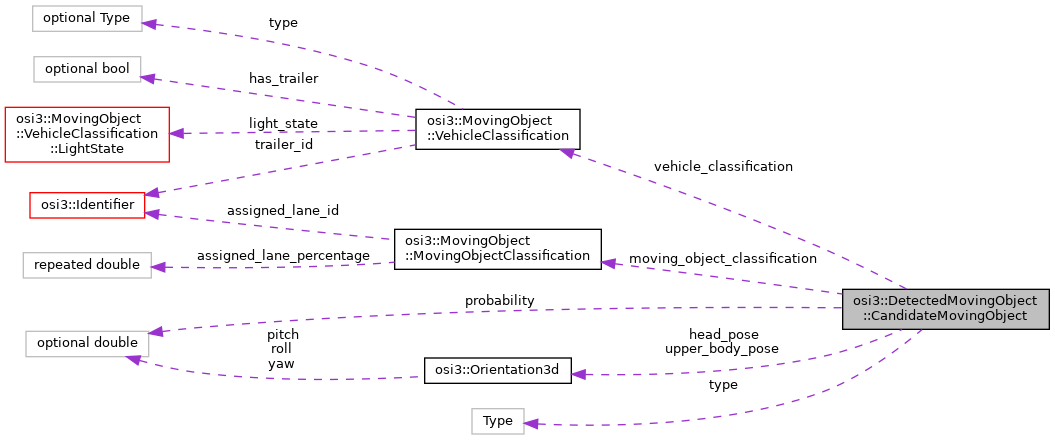
A candidate for a detected moving object as estimated by the sensor. More...
Public Attributes | |
| optional double | probability = 1 |
| optional MovingObject::Type | type = 2 |
| optional MovingObject::VehicleClassification | vehicle_classification = 3 |
| optional Orientation3d | head_pose = 4 |
| optional Orientation3d | upper_body_pose = 5 |
| optional MovingObject::MovingObjectClassification | moving_object_classification = 6 |
Detailed Description
A candidate for a detected moving object as estimated by the sensor.
Member Data Documentation
◆ head_pose
| optional Orientation3d osi3::DetectedMovingObject::CandidateMovingObject::head_pose = 4 |
Pedestrian head pose for behavior prediction. Describes the head orientation w.r.t. the host vehicle orientation. The x-axis of the right-handed head frame is pointing along the pedestrian's straight ahead viewing direction (anterior), the y-axis lateral to the left, and the z-axis is pointing upwards (superior) [1].
View_normal_base_coord_system = Inverse_Rotation(#head_pose)*Unit_vector_x
- Note
- This field is mandatory if the
CandidateMovingObject.typeisMovingObject::TYPE_PEDESTRIAN
- Reference:
[1] Patton, K. T. & Thibodeau, G. A. (2015). Anatomy & Physiology. 9th Edition. Elsevier. Missouri, U.S.A. ISBN 978-0-323-34139-4. p. 1229.
◆ moving_object_classification
| optional MovingObject::MovingObjectClassification osi3::DetectedMovingObject::CandidateMovingObject::moving_object_classification = 6 |
Specific information about the classification of a moving object.
◆ probability
| optional double osi3::DetectedMovingObject::CandidateMovingObject::probability = 1 |
The estimated probability that this candidate is the true value.
- Note
- The sum of all
probabilitymust be one. This probability is given under the condition ofDetectedItemHeader::existence_probability.
\rules is_greater_than_or_equal_to: 0 is_less_than_or_equal_to: 1 \endrules
◆ type
| optional MovingObject::Type osi3::DetectedMovingObject::CandidateMovingObject::type = 2 |
The description of the moving object (e.g. car).
◆ upper_body_pose
| optional Orientation3d osi3::DetectedMovingObject::CandidateMovingObject::upper_body_pose = 5 |
Pedestrian upper body pose for behavior prediction. Describes the upper body orientation w.r.t. the host vehicle orientation. The x-axis of the right-handed upper body frame is pointing along the pedestrian's upper body ventral (anterior) direction (i.e. usually pedestrian's intended moving direction), the y-axis lateral to the left, and the z-axis is pointing upwards (superior, to the pedestrian's head) [1].
View_normal_base_coord_system = Inverse_Rotation(#upper_body_pose)*Unit_vector_x
- Note
- This field is mandatory if the
CandidateMovingObject::typeisMovingObject::TYPE_PEDESTRIAN
- Reference:
- [1] Patton, K. T. & Thibodeau, G. A. (2015). Anatomy & Physiology. 9th Edition. Elsevier. Missouri, U.S.A. ISBN 978-0-323-34139-4. p. 1229.
◆ vehicle_classification
| optional MovingObject::VehicleClassification osi3::DetectedMovingObject::CandidateMovingObject::vehicle_classification = 3 |
Specific information about the classification of the vehicle.
- Note
- This field is mandatory if the
CandidateMovingObject::typeisMovingObject::TYPE_VEHICLE.
The documentation for this struct was generated from the following file:
- osi_detectedobject.proto