Processed data from one or multiple sensors as a list of logical detections. More...
Public Attributes | |
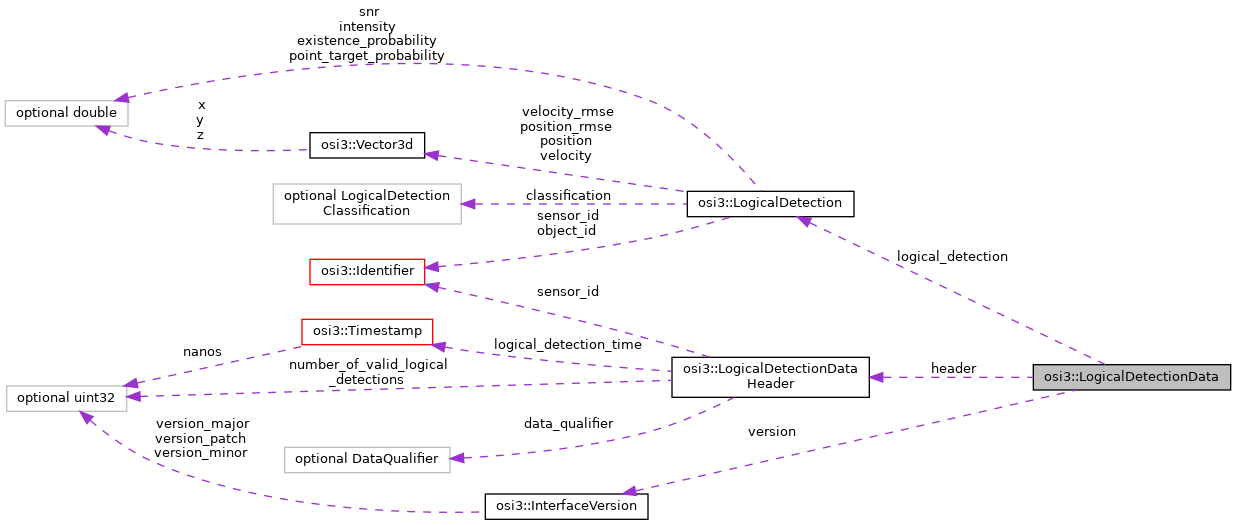
| optional InterfaceVersion | version = 1 |
| The interface version used by the sender (i.e. More... | |
| optional LogicalDetectionDataHeader | header = 2 |
| Header attributes of fused detections from multiple sensors and sensor types. More... | |
| repeated LogicalDetection | logical_detection = 3 |
| logical detections consisting of transformed (and potentially fused) detections from one or multiple sensors and sensor types. More... | |
Detailed Description
Processed data from one or multiple sensors as a list of logical detections.
Logical detections are derived from sensor detections in a logical model through processing steps like fusion filtering, tracking etc.
All information is given with respect to the reference frame of the logical/virtual sensor SensorView::mounting_position (e.g. center of rear axle of the ego car) in Cartesian coordinates.
Member Data Documentation
◆ version
| optional InterfaceVersion osi3::LogicalDetectionData::version = 1 |
The interface version used by the sender (i.e.
the simulation environment).
◆ header
| optional LogicalDetectionDataHeader osi3::LogicalDetectionData::header = 2 |
Header attributes of fused detections from multiple sensors and sensor types.
◆ logical_detection
| repeated LogicalDetection osi3::LogicalDetectionData::logical_detection = 3 |
logical detections consisting of transformed (and potentially fused) detections from one or multiple sensors and sensor types.
Logical detections are given with respect to the reference frame of the logical/virtual sensor SensorView::mounting_position (e.g. center of rear axle of the ego car)
The documentation for this struct was generated from the following file:
- osi_logicaldetectiondata.proto
