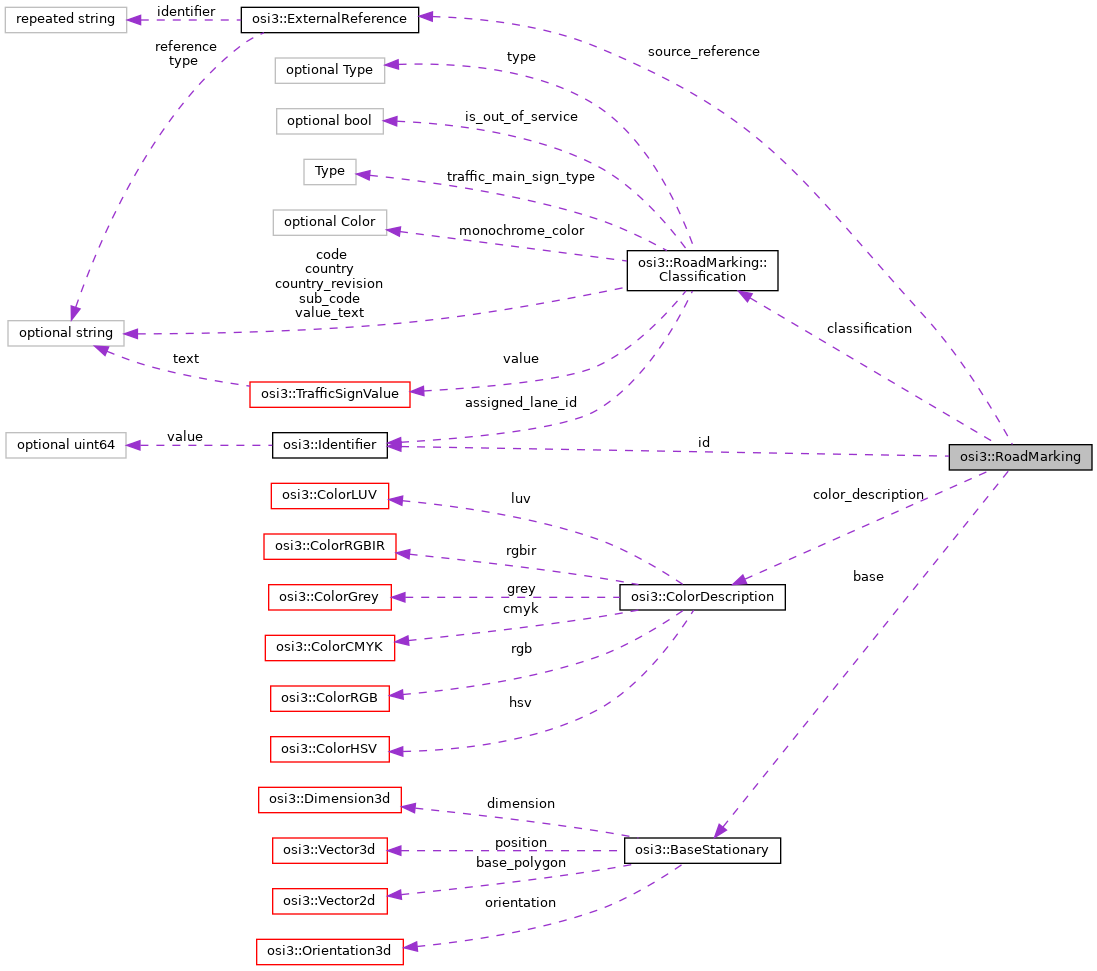
A road surface marking. More...
Classes | |
| struct | Classification |
Classification data for a road surface marking. More... | |
Public Attributes | |
| optional Identifier | id = 1 |
| optional BaseStationary | base = 2 |
| optional Classification | classification = 3 |
| repeated ExternalReference | source_reference = 4 |
| optional ColorDescription | color_description = 5 |
Detailed Description
A road surface marking.
The figure shows two STOP road markings. STOP RoadMarking::Classification::type == RoadMarking::Classification::TYPE_TEXTUAL_TRAFFIC_SIGN is marked, STOP RoadMarking::Classification::type == RoadMarking::Classification::TYPE_SYMBOLIC_TRAFFIC_SIGN is not marked.
All coordinates and orientations are relative to the global ground truth coordinate system.
Lane markings are excluded and defined as LaneBoundary messages as part of Lane.
Member Data Documentation
◆ base
| optional BaseStationary osi3::RoadMarking::base = 2 |
The base parameters of the road marking.
The orientation of the bounding box base BaseStationary::orientation is defined as follows: The z-axis of the BaseStationary::orientation is the vector from the 'bottom' to the 'top' of the road marking's (i.e. painted traffic sign) 2D image area. (Normally it is in the ground truth xy-plain.) The x-axis of the BaseStationary::orientation is the view normal of the road marking's 2D image area. Normally this x-axis points to the sky.
- Note
- If a valid unidirectional road marking is assigned to the host vehicle's current lane and the driving direction of the latter roughly matches the z-axis of the
baseBaseStationary::orientationthen the road marking is of relevance to (i.e. in effect for) the host vehicle.
◆ classification
| optional Classification osi3::RoadMarking::classification = 3 |
The classification data for the road marking.
◆ color_description
| optional ColorDescription osi3::RoadMarking::color_description = 5 |
The visual color of the material of the road marking.
- Note
- This does not represent the semantic classification but the visual appearance. For semantic classification of the road marking use the color field in
Classification.
◆ id
| optional Identifier osi3::RoadMarking::id = 1 |
The ID of the road marking.
◆ source_reference
| repeated ExternalReference osi3::RoadMarking::source_reference = 4 |
Optional external reference to the road-marking source.
The external reference points to the source of the surface marking, if it is derived from one or more objects or external references. An example here is the reference to the signal defined in a OpenDRIVE map.
For example, to reference a signal defined in an OpenDRIVE map the items should be set as follows:
- reference = URI to map, can remain empty if identical with definiton in
GroundTruth::map_reference - type = "net.asam.opendrive"
- identifier[0] = id of t_road_signals_signal
- Note
- With OpenDRIVE, surface markings can also be defined as objects. In this case, the associated object is usually referenced within OpenDRIVE using the reference t_road_signals_signal_reference. An additional reference to the object is therefore not necessary.
- For non-ASAM Standards, it is implementation-specific how source_reference is resolved.
- The value has to be repeated, because one lane segment may be derived from more than one origin segment. Multiple sources may be added as reference as well, for example, a map and sensors.
The documentation for this struct was generated from the following file:
- osi_roadmarking.proto