The vehicle attributes for MovingObject (host or other).
More...
Classes | |
| struct | WheelData |
| Detailed wheel data. The focus is on the description of a wheel regarding the perceivable information from the outside. It is not intended to be used for dynamic calculations, for example. More... | |
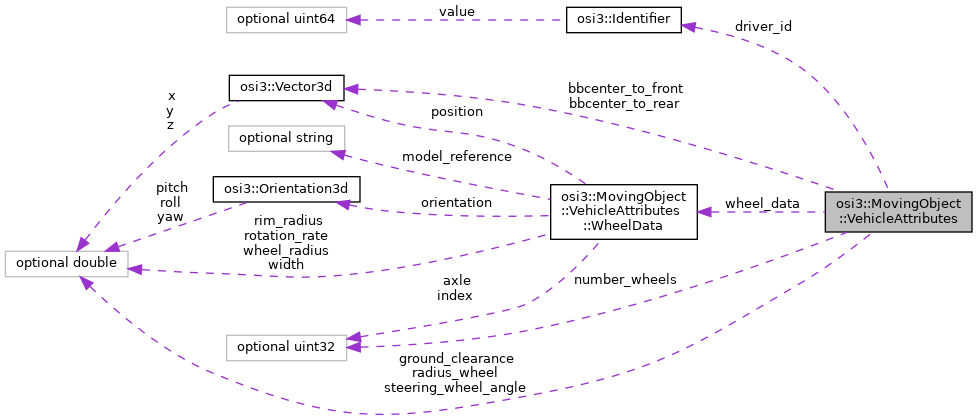
Public Attributes | |
| optional Identifier | driver_id = 1 |
| optional double | radius_wheel = 2 |
| optional uint32 | number_wheels = 3 |
| optional Vector3d | bbcenter_to_rear = 4 |
| optional Vector3d | bbcenter_to_front = 5 |
| optional double | ground_clearance = 6 |
| repeated WheelData | wheel_data = 7 |
| optional double | steering_wheel_angle = 8 |
Detailed Description
The vehicle attributes for MovingObject (host or other).
This is an extension to the MovingObject with additional attributes, such as type and lights. The origin of the rear (front) axis coordinate system in global coordinates is calculated as: MovingObject::base . BaseMoving::position + R * MovingObject::VehicleAttributes::bbcenter_to_rear (front) for the host vehicle (R rotates from vehicle to world frame, i.e. inverse orientation of MovingObject::base . BaseMoving::orientation).
For all vehicles, including host vehicles, the position given in MovingObject::base . BaseMoving::position points to the center of the vehicle's bounding box.
The vehicle object coordinates are defined as x-axis is the direction from rear to front of the vehicle, y-axis corresponds to rear axle and z-axis points to vehicle ceiling [1]. The coordinate system is right-handed. Therefore the positive y-axis points to the left of the vehicle.
- Reference:
- [1] DIN Deutsches Institut fuer Normung e. V. (2013). DIN ISO 8855 Strassenfahrzeuge - Fahrzeugdynamik und Fahrverhalten - Begriffe. (DIN ISO 8855:2013-11). Berlin, Germany.
Member Data Documentation
◆ bbcenter_to_front
| optional Vector3d osi3::MovingObject::VehicleAttributes::bbcenter_to_front = 5 |
The vector pointing from the bounding box center point (MovingObject::base . BaseMoving::position) to the middle (in x, y and z) of the front axle under neutral load conditions. In object coordinates.
◆ bbcenter_to_rear
| optional Vector3d osi3::MovingObject::VehicleAttributes::bbcenter_to_rear = 4 |
The vector pointing from the bounding box center point (MovingObject::base . BaseMoving::position) to the middle (in x, y and z) of the rear axle under neutral load conditions. In object coordinates.
◆ driver_id
| optional Identifier osi3::MovingObject::VehicleAttributes::driver_id = 1 |
The ID of the driver of the (host) vehicle.
- Note
- Field need not be set if host_vehicle is set to false or use value for non valid id.
◆ ground_clearance
| optional double osi3::MovingObject::VehicleAttributes::ground_clearance = 6 |
Static minimal distance or space from the lowest point of the vehicle's body to the surface plane below it under neutral load conditions. This distance disregards, for example, driving-dynamic effects or road-surface effects. Can be useful to approximate the clearance area under a vehicle that a sensor can see through.
- Note
ground_clearanceis included in the bounding box height.
◆ number_wheels
| optional uint32 osi3::MovingObject::VehicleAttributes::number_wheels = 3 |
Number of independent wheels.
\rules is_greater_than_or_equal_to: 1 \endrules
◆ radius_wheel
| optional double osi3::MovingObject::VehicleAttributes::radius_wheel = 2 |
Deprecated: Will be removed in next major release. Moved to WheelData. Median radius of the wheels measured from a center of the wheel including tire.
Unit: m
\rules is_greater_than_or_equal_to: 0 \endrules
◆ steering_wheel_angle
| optional double osi3::MovingObject::VehicleAttributes::steering_wheel_angle = 8 |
Angle of the steering wheel. Zero means the steering wheel is in its center postion, a positive value means the steering wheel is turned to the left and a negative value means the steering wheel is turned to the right of the center position.
Unit: rad
◆ wheel_data
| repeated WheelData osi3::MovingObject::VehicleAttributes::wheel_data = 7 |
Description of each wheel.
- Note
- OSI uses singular instead of plural for repeated field names.
The documentation for this struct was generated from the following file:
- osi_object.proto