osi3::DetectedStationaryObject::CandidateStationaryObject Struct Reference
A candidate for a detected stationary object as estimated by the sensor. More...
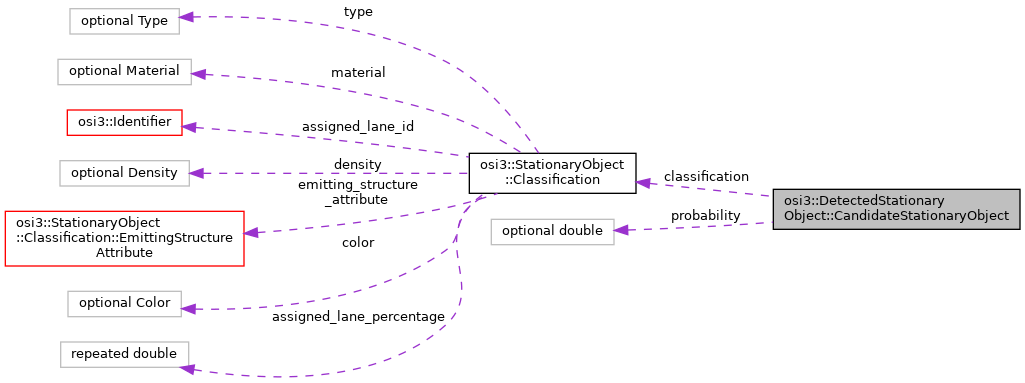
Collaboration diagram for osi3::DetectedStationaryObject::CandidateStationaryObject:
Public Attributes | |
| optional double | probability = 1 |
| optional StationaryObject::Classification | classification = 2 |
Detailed Description
A candidate for a detected stationary object as estimated by the sensor.
Member Data Documentation
◆ classification
| optional StationaryObject::Classification osi3::DetectedStationaryObject::CandidateStationaryObject::classification = 2 |
The classification of the stationary object (e.g. landmark).
◆ probability
| optional double osi3::DetectedStationaryObject::CandidateStationaryObject::probability = 1 |
The estimated probability that this candidate is the true value.
- Note
- The sum of all
probabilitymust be one. This probability is given under the condition ofDetectedItemHeader::existence_probability.
\rules is_greater_than_or_equal_to: 0 is_less_than_or_equal_to: 1 \endrules
The documentation for this struct was generated from the following file:
- osi_detectedobject.proto