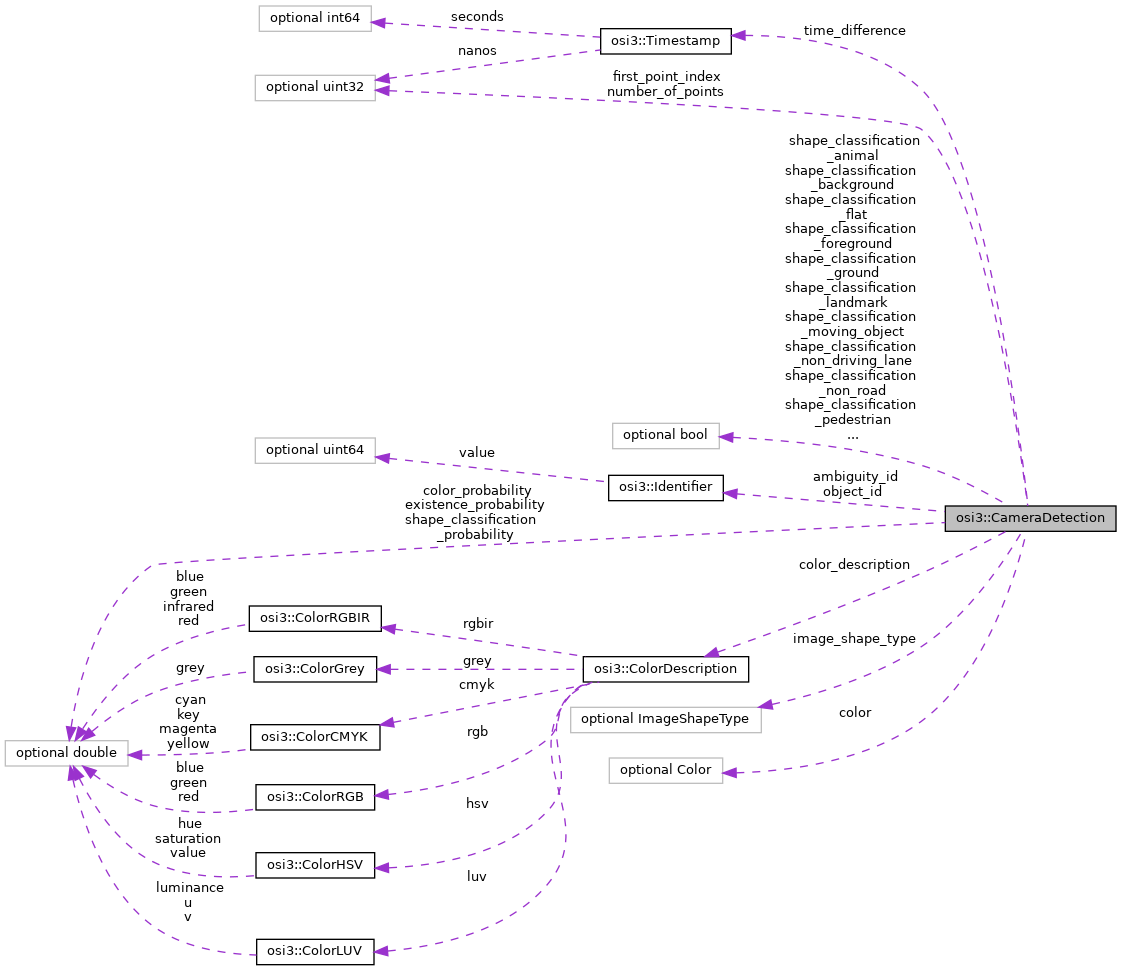
Camera detection from the sensor. More...
Public Types | |
| enum | Color { COLOR_UNKNOWN = 0 , COLOR_OTHER = 1 , COLOR_BLACK = 2 , COLOR_GREY = 3 , COLOR_WHITE = 4 , COLOR_YELLOW = 5 , COLOR_ORANGE = 6 , COLOR_RED = 7 , COLOR_VIOLET = 8 , COLOR_BLUE = 9 , COLOR_GREEN = 10 , COLOR_REFLECTIVE = 11 } |
| enum | ImageShapeType { IMAGE_SHAPE_TYPE_UNKNOWN = 0 , IMAGE_SHAPE_TYPE_OTHER = 1 , IMAGE_SHAPE_TYPE_POINT = 2 , IMAGE_SHAPE_TYPE_BOX = 3 , IMAGE_SHAPE_TYPE_ELLIPSE = 4 , IMAGE_SHAPE_TYPE_POLYGON = 5 , IMAGE_SHAPE_TYPE_POLYLINE = 6 , IMAGE_SHAPE_TYPE_POINT_CLOUD = 7 } |
Detailed Description
Camera detection from the sensor.
Member Enumeration Documentation
◆ Color
Definition of shape dominant color.
- Attention
- DEPRECATED: This color enum will be removed in version 4.0.0. Use
ColorDescriptioninstead.
◆ ImageShapeType
Definition of different image shape types.
Member Data Documentation
◆ ambiguity_id
| optional Identifier osi3::CameraDetection::ambiguity_id = 30 |
If one shape has different shape classifications and shape classification probability or color and color probability, all detections in this cycle have the same ambiguity ID.
- Note
- ID = MAX(uint64) indicates no reference to an object.
◆ color
| optional Color osi3::CameraDetection::color = 28 |
The dominant color of the shape.
- Attention
- DEPRECATED: This color enum will be removed in version 4.0.0. Use the field
color_description(ColorDescription) instead.
◆ color_description
| optional ColorDescription osi3::CameraDetection::color_description = 33 |
The dominant color of the shape.
◆ color_probability
| optional double osi3::CameraDetection::color_probability = 29 |
The probability of the shape's color.
\rules is_greater_than_or_equal_to: 0 is_less_than_or_equal_to: 1 \endrules
◆ existence_probability
| optional double osi3::CameraDetection::existence_probability = 1 |
Existence probability of the detection not based on history. Value does not depend on any past experience with similar detections.
- Note
- Used as confidence measure where a low value means less confidence and a high value indicates strong confidence.
\rules is_greater_than_or_equal_to: 0 is_less_than_or_equal_to: 1 \endrules
◆ first_point_index
| optional uint32 osi3::CameraDetection::first_point_index = 31 |
Index of the first point in the camera detection.
◆ image_shape_type
| optional ImageShapeType osi3::CameraDetection::image_shape_type = 4 |
Definition of the image shape type of this detection.
◆ number_of_points
| optional uint32 osi3::CameraDetection::number_of_points = 32 |
Number of points which defines the shape. image_shape_type may restrict the number of possible values.
\rules is_greater_than_or_equal_to: 0 \endrules
◆ object_id
| optional Identifier osi3::CameraDetection::object_id = 2 |
ID of the detected object this detection is associated to.
- Note
- ID = MAX(uint64) indicates no reference to an object.
\rules refers_to: DetectedObject \endrules
◆ shape_classification_animal
| optional bool osi3::CameraDetection::shape_classification_animal = 23 |
The defined shape is an animal. The probability for this classification is at least shape_classification_probability.
◆ shape_classification_background
| optional bool osi3::CameraDetection::shape_classification_background = 5 |
The defined shape is background. The probability for this classification is at least shape_classification_probability.
◆ shape_classification_flat
| optional bool osi3::CameraDetection::shape_classification_flat = 7 |
The defined shape is flat. The probability for this classification is at least shape_classification_probability.
◆ shape_classification_foreground
| optional bool osi3::CameraDetection::shape_classification_foreground = 6 |
The defined shape is foregroud. The probability for this classification is at least shape_classification_probability.
◆ shape_classification_ground
| optional bool osi3::CameraDetection::shape_classification_ground = 9 |
The defined shape is ground. The probability for this classification is at least shape_classification_probability.
◆ shape_classification_landmark
| optional bool osi3::CameraDetection::shape_classification_landmark = 17 |
The defined shape is a landmark. The probability for this classification is at least shape_classification_probability.
◆ shape_classification_moving_object
| optional bool osi3::CameraDetection::shape_classification_moving_object = 16 |
The defined shape is a possible moving object. The probability for this classification is at least shape_classification_probability.
◆ shape_classification_non_driving_lane
| optional bool osi3::CameraDetection::shape_classification_non_driving_lane = 13 |
The defined shape is a non-driving lane (e.g. sidewalk). The probability for this classification is at least shape_classification_probability.
◆ shape_classification_non_road
| optional bool osi3::CameraDetection::shape_classification_non_road = 14 |
The defined shape is non-road (e.g. traffic island). The probability for this classification is at least shape_classification_probability.
◆ shape_classification_pedestrian
| optional bool osi3::CameraDetection::shape_classification_pedestrian = 22 |
The defined shape is a pedestrian. The probability for this classification is at least shape_classification_probability.
◆ shape_classification_pedestrian_front
| optional bool osi3::CameraDetection::shape_classification_pedestrian_front = 24 |
The defined shape is a pedestrian seen by the sensor from the front. The probability for this classification is at least shape_classification_probability.
◆ shape_classification_pedestrian_rear
| optional bool osi3::CameraDetection::shape_classification_pedestrian_rear = 26 |
The defined shape is a pedestrian seen by the sensor from the rear. The probability for this classification is at least shape_classification_probability.
◆ shape_classification_pedestrian_side
| optional bool osi3::CameraDetection::shape_classification_pedestrian_side = 25 |
The defined shape is a pedestrian seen by the sensor from the side. The probability for this classification is at least shape_classification_probability.
◆ shape_classification_probability
| optional double osi3::CameraDetection::shape_classification_probability = 27 |
This probability defines the mininimum probability for each selected shape classification.
\rules is_greater_than_or_equal_to: 0 is_less_than_or_equal_to: 1 \endrules
◆ shape_classification_road
| optional bool osi3::CameraDetection::shape_classification_road = 12 |
The defined shape is a road. The probability for this classification is at least shape_classification_probability.
◆ shape_classification_road_marking
| optional bool osi3::CameraDetection::shape_classification_road_marking = 20 |
The defined shape is a road marking sign. The probability for this classification is at least shape_classification_probability.
◆ shape_classification_sky
| optional bool osi3::CameraDetection::shape_classification_sky = 10 |
The defined shape is sky. The probability for this classification is at least shape_classification_probability.
◆ shape_classification_stationary_object
| optional bool osi3::CameraDetection::shape_classification_stationary_object = 15 |
The defined shape is a stationary object. The probability for this classification is at least shape_classification_probability.
◆ shape_classification_traffic_light
| optional bool osi3::CameraDetection::shape_classification_traffic_light = 19 |
The defined shape is a traffic light. The probability for this classification is at least shape_classification_probability.
◆ shape_classification_traffic_sign
| optional bool osi3::CameraDetection::shape_classification_traffic_sign = 18 |
The defined shape is a traffic sign. The probability for this classification is at least shape_classification_probability.
◆ shape_classification_upright
| optional bool osi3::CameraDetection::shape_classification_upright = 8 |
The defined shape is upright. The probability for this classification is at least shape_classification_probability.
◆ shape_classification_vegetation
| optional bool osi3::CameraDetection::shape_classification_vegetation = 11 |
The defined shape is vegetation. The probability for this classification is at least shape_classification_probability.
◆ shape_classification_vehicle
| optional bool osi3::CameraDetection::shape_classification_vehicle = 21 |
The defined shape is a vehicle. The probability for this classification is at least shape_classification_probability.
◆ time_difference
| optional Timestamp osi3::CameraDetection::time_difference = 3 |
Difference to the base timestamp SensorDetectionHeader::measurement_time.
The timestamp of this detection := SensorDetectionHeader::measurement_time + time_difference.
The documentation for this struct was generated from the following file:
- osi_featuredata.proto