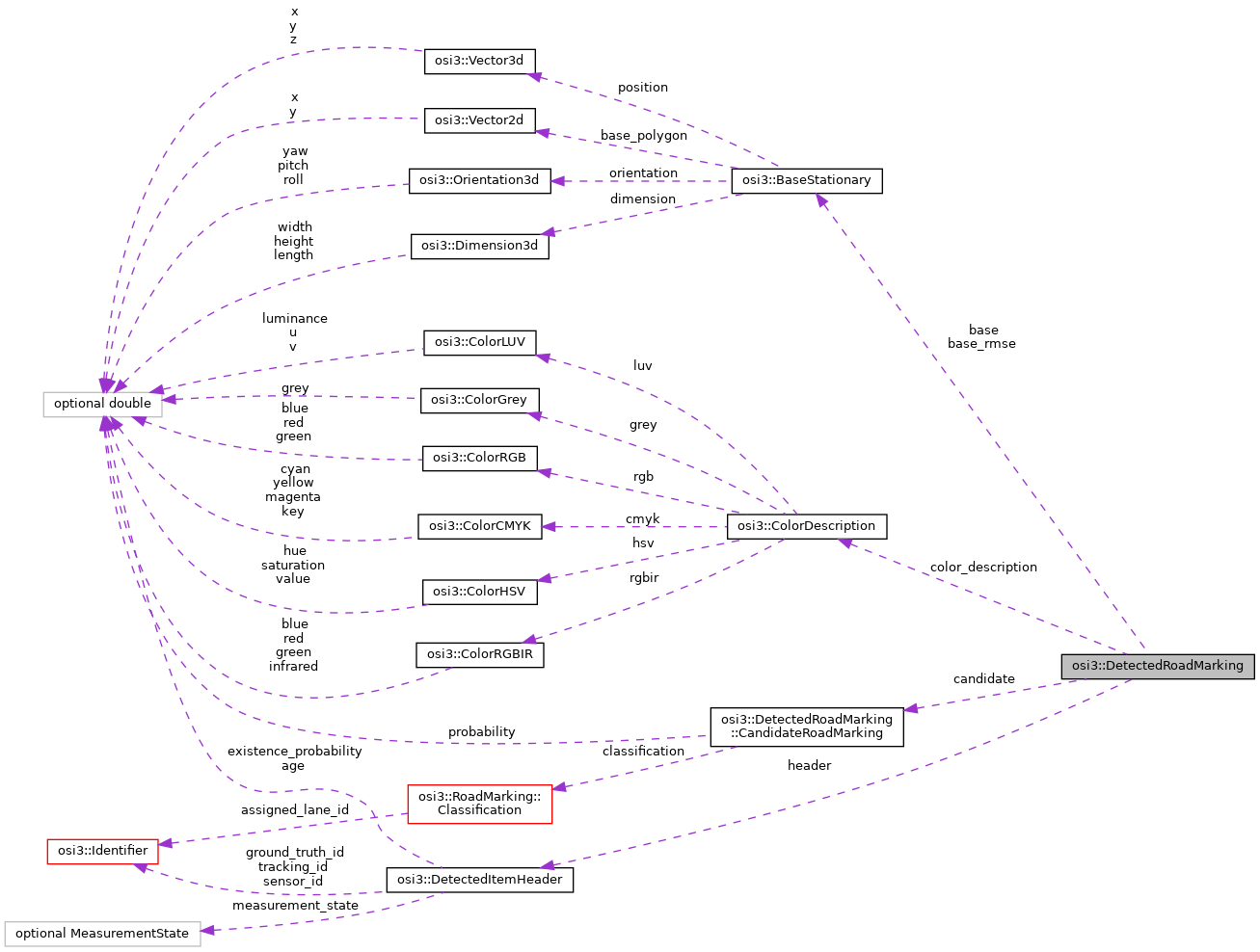
A road marking in the environment as detected by the sensor. More...
Classes | |
| struct | CandidateRoadMarking |
| A candidate for a detected road marking as estimated by the sensor. More... | |
Public Attributes | |
| optional DetectedItemHeader | header = 1 |
| Common information of one detected item. More... | |
| optional BaseStationary | base = 2 |
| The base parameters of the road marking. More... | |
| optional BaseStationary | base_rmse = 3 |
| The root mean squared error of the base parameters of the detected road marking. More... | |
| repeated CandidateRoadMarking | candidate = 4 |
| A list of candidates for this road marking as estimated by the sensor. More... | |
| optional ColorDescription | color_description = 5 |
| The visual color of the material of the road marking. More... | |
Detailed Description
A road marking in the environment as detected by the sensor.
The figure shows two STOP road markings (DetectedRoadMarking::CandidateRoadMarking::classification). STOP RoadMarking::Classification::type == RoadMarking::Classification::TYPE_TEXTUAL_TRAFFIC_SIGN is marked, STOP RoadMarking::Classification::type == RoadMarking::Classification::TYPE_SYMBOLIC_TRAFFIC_SIGN is not marked.
Member Data Documentation
◆ header
| optional DetectedItemHeader osi3::DetectedRoadMarking::header = 1 |
Common information of one detected item.
◆ base
| optional BaseStationary osi3::DetectedRoadMarking::base = 2 |
The base parameters of the road marking.
The orientation of the bounding box base BaseStationary::orientation is defined as follows: The z-axis of the BaseStationary::orientation is the vector from the 'bottom' to the 'top' of the road marking's (i.e. painted traffic sign) 2D image area. (Normally it is in the ground truth xy-plain.) The x-axis of the BaseStationary::orientation is the view normal of the road marking's 2D image area. Normally this x-axis points to the sky.
- Note
- If a valid unidirectional road marking is assigned to the host vehicle's current lane and the driving direction of the latter roughly matches the z-axis of the
baseBaseStationary::orientationthen the road marking is of relevance to (i.e. in effect for) the host vehicle.
◆ base_rmse
| optional BaseStationary osi3::DetectedRoadMarking::base_rmse = 3 |
The root mean squared error of the base parameters of the detected road marking.
RoadMarking::base has to be identical for all candidate road markings.
◆ candidate
| repeated CandidateRoadMarking osi3::DetectedRoadMarking::candidate = 4 |
A list of candidates for this road marking as estimated by the sensor.
◆ color_description
| optional ColorDescription osi3::DetectedRoadMarking::color_description = 5 |
The visual color of the material of the road marking.
- Note
- This does not represent the semantic classification but the visual appearance. For semantic classification of the road marking use the color field in
CandidateRoadMarking::classification.
The documentation for this struct was generated from the following file:
- osi_detectedroadmarking.proto
