osi3::TrafficAction::FollowPathAction Struct Reference
Follow path action. More...
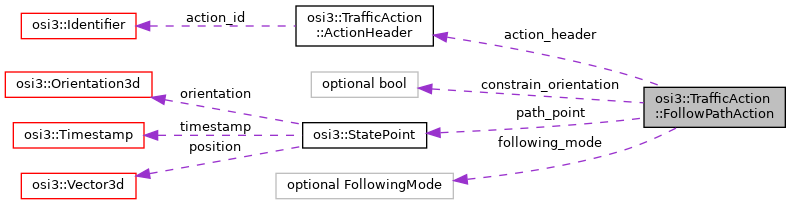
Collaboration diagram for osi3::TrafficAction::FollowPathAction:
Public Attributes | |
| optional ActionHeader | action_header = 1 |
| repeated StatePoint | path_point = 2 |
| optional bool | constrain_orientation = 3 |
| optional FollowingMode | following_mode = 4 |
Detailed Description
Follow path action.
Controls a traffic participant to follow a path using vertices. It specifies the motion in space independent of time.
- Note
- The StatePoint messages in path_point only requires a specified position field. The orientation can be set optionally. Any timestamp StatePoint values are ignored.
- This action is aligned with the FollowTrajectoryAction of OpenSCENARIO 1.0 using a 3/6D trajectory with shape Polyline.
Member Data Documentation
◆ action_header
| optional ActionHeader osi3::TrafficAction::FollowPathAction::action_header = 1 |
The action header
◆ constrain_orientation
| optional bool osi3::TrafficAction::FollowPathAction::constrain_orientation = 3 |
Constrain the orientation of the traffic participant as specified by the path points.
This boolean flag defines whether orientation values supplied in the path points shall be used to constrain the orientation of the traffic participant or not.
◆ following_mode
| optional FollowingMode osi3::TrafficAction::FollowPathAction::following_mode = 4 |
Specify the following mode that should be employed in executing the path.
◆ path_point
| repeated StatePoint osi3::TrafficAction::FollowPathAction::path_point = 2 |
A list of path StatePoints
Set the position fields for all path points. The timestamp field are not required and ignored. The orientation fields can be set depending on the constrain_orientation field being true.
- Note
- OSI uses singular instead of plural for repeated field names.
The documentation for this struct was generated from the following file:
- osi_trafficcommand.proto